
Select an object in a hierarchy where you want IK to start. > Animation menu > IK Solvers > Apply an IK solver. > Click the object in the hierarchy where you want the IK chain to end (for the IK Limb Solver, click two bones from the first click).
An IK solver creates an inverse kinematic solution to rotate and position links in a chain. It applies an IK Controller to govern the transforms of the children in a linkage. You can apply an IK solver to any hierarchy of objects, or you can use IK solvers with a system of bones. You apply an IK solver to a hierarchy or part of a hierarchy using commands on the Animation menu. Select an object in the hierarchy, choose an IK solver, and then click another object in the hierarchy to define the end of the IK chain.
Bones system with IK solver applied
IK solvers are plug-ins, so programmers can expand the software's capabilities by customizing or writing their own IK solvers. In gmax, the only IK Solver available is the IK Limb Solver.
An IK solver generally operates in this way: an inverse kinematic chain is defined on part of the hierarchy, say from the hip to the heel, or the shoulder to the wrist of a character. At the end of the IK chain is a gizmo, called the goal. The goal can be repositioned or animated over time in a variety of ways, often using linkage or constraints. No matter how the goal is moved, the IK solver attempts to move the pivot of the last joint in the chain (also called the end effector) to meet the goal. The IK solver rotates the parts of the chain to stretch out and reposition the end effector to coincide with the goal.

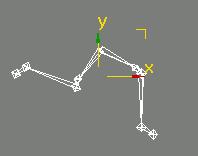
Using an IK solver to animate an arm
Frequently, the end effector is constrained to the ground plane. For example, you might "pin" the toes as the heels lift in a walk cycle. Then the movement of the heel poses the foot up to the toes.
One plug-in IK solver ships with gmax:
The IK Limb solver operates on only two bones in a chain. It is an analytical solver that is fast in viewports, and can animate the arms and legs of a character.
This solver creates a goal and an end effector (although the display of end effector is off by default). It uses a swivel angle to adjust the solver plane to position the elbow or the knee. You can display the swivel angle manipulator as a handle in the viewport, and adjust it. The IK Limb Solver also uses a preferred angle to define a direction for rotation, so the elbow or knees bend correctly.
The IK Limb solver is meant for export to game engines. Its code is a component delivered as part of the Discreet Open Source initiative.
Note: gmax also provides two other methods of inverse kinematic manipulation of hierarchies, which don't depend on a solver: Interactive IK and Applied IK.
While you can apply an IK solver to any hierarchy of objects, a system of Bones combined with an IK solver is a good way to animate a character.
A bones system is a jointed, hierarchical linkage of bone objects. Bones are used as an armature on to which objects are linked. If you use the skin modifier, you can "skin" an object to the bones, so the animation of the bones deforms the mesh that models a character.


Animating bones with skin causes the skin to stretch or shrink
Any object can be turned into a bone object. Right-click any object and select Properties from the quad menu. In the Bone group, choose Bone On/Off. You can also use the Display panel, in the Link Display rollout to turn on Display Links and Link Replaces Object to display the bones instead of the object.


Any object hierarchy can be displayed as bones.
Bones can scale, squash and stretch over time. See Using Objects as Bones.
It is possible to animate a character's motion through forward kinematics, rotating each limb into position from the shoulder to the fingers, and the hips to the toes. But it's a lot quicker and more realistic to use inverse kinematics to simulate the foot interacting with the ground. And it is a lot easier to control when you need to make changes to the animation. Rather than having keyframes on every bone in the chain, you have to make changes only to one node, to change the animation of the entire chain.
On the other hand, it is common for animators to use IK for the legs and FK for the torso and the arms. FK offers a bit more control for posing the upper body. It is not necessary to use IK for every character animation task. Using the IK Limb Solver allows you to jump back and forth easily between FK and IK.
You can apply an IK solver when you create a Bones system, or from the Animation menu:
When you create bones, turning on the Assign to Children option lets you apply an IK solver immediately. Default is Off.
More often, you will apply the IK solver to a part of the skeleton later using Animation menu > IK Solvers. You must select the node where you want the IK chain to start, then choose Animation menu > IK Solvers > IK Limb Solver. Then click the node where you want the chain to end. The chain will be created between the pivot points of the two nodes.
Note: The IK Limb Solver is a two bone solver. You need three bones to put the solver on the chain. The goal is placed at the pivot point of the third bone, but doesn't affect the third bone.
Warning: If you assign an IK Limb Solver to a chain of more than two bones, it will have no effect on the chain.
You adjust IK solver settings in the Motion and Hierarchy panels:
When the goal of an IK chain is selected, the motion panel displays the rollouts for the individual IK solver.
IK Limb Solver: Motion panel parameters adjust the swivel angle of the solver plane, to point the knees and elbows. Also, the controls in the IK Solver rollout let you mix periods of IK with FK (forward kinematics) through the Enabled button and the IK button.
IK Limb Solver: When a bone is selected, the IK panel displays controls to activate and limit the rotational joints, and set a preferred angle for the joints. The preferred-angle poses of all the joints help control the direction of rotation of the limbs. When a goal is selected, the IK panel is blank.
Procedures
To add an IK solver to a hierarchy or bones system:
Create a Bones system or any other linked hierarchy of objects.
Select a Bone or object where you'd like the IK chain to start.
Choose Animation menu > IK Solvers, and choose the IK Limb Solver:
Click two bones down the chain from the start joint.
The IK solver appears in the viewport. To test if it works, try moving the goal. If the chain moves, you have correctly assigned the solver. If not, you have assigned the solver to more a chain of than two bones.
To create a bones hierarchy that uses an IK solver:

 Go to the Create panel, choose Systems, and click Bones.
Go to the Create panel, choose Systems, and click Bones.
In the IK Chain Assignment rollout, select the IK Limb solver.
Turn on Assign To Children.
Click and drag in a viewport to create the bones. Right-click to stop bone creation. A third "nub" bone is automatically created when you right-click.
The bones are drawn with the IK solver already applied.